Paper Link. Prototyping large, electronically integrated structures is challenging and often results in unwieldy wiring, weak mechanical properties, expensive iterations, or limited reusability. While many electronics prototyping kits exist for small-scale objects, relatively few methods exist to freely iterate large and sturdy structures with integrated electronics. To address this gap, we present the Voxel Invention Kit (VIK), which uses reconfigurable blocks that assemble into high-stiffness, lightweight structures with integrated electronics. We do this by creating cubic blocks composed of PCBs that carry electrical routing and components and can be (re)configured with simple tools into a variety of structures. To ensure structural stability without expertise, we created a tool to configure structures and simulate applied loads, which we validated with mechanical testing data. Using VIK, we produced devices reconfigured from a shared set of voxels: multiple iterations of a customizable AV lounge seat, a dance floor game, and a force-sensing bridge. MIT News Link: https://news.mit.edu/2025/new-platform-lets-anyone-rapidly-prototype-large-sturdy-interactive-structures-0318https://www.cba.mit.edu/amiraa/nvidia-omniverse-metavoxels Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
During my internship at NVIDIA, I developed an Omniverse Kit Extension to design, simulate MetaVoxels (robots composed of discrete modular voxels with different mechanical properties). I first developed a robot shape grammar and rules to describe how they can be built. This rules are then used to search for the best robot architecture (shape) and control given a task. Isaac sim was used to simulate the robots and Isaac Gym for the multi-GPU reinforcement learning (RL) workflow. GitLab Link: https://www.cba.mit.edu/amiraa/nvidia-omniverse-metavoxels Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
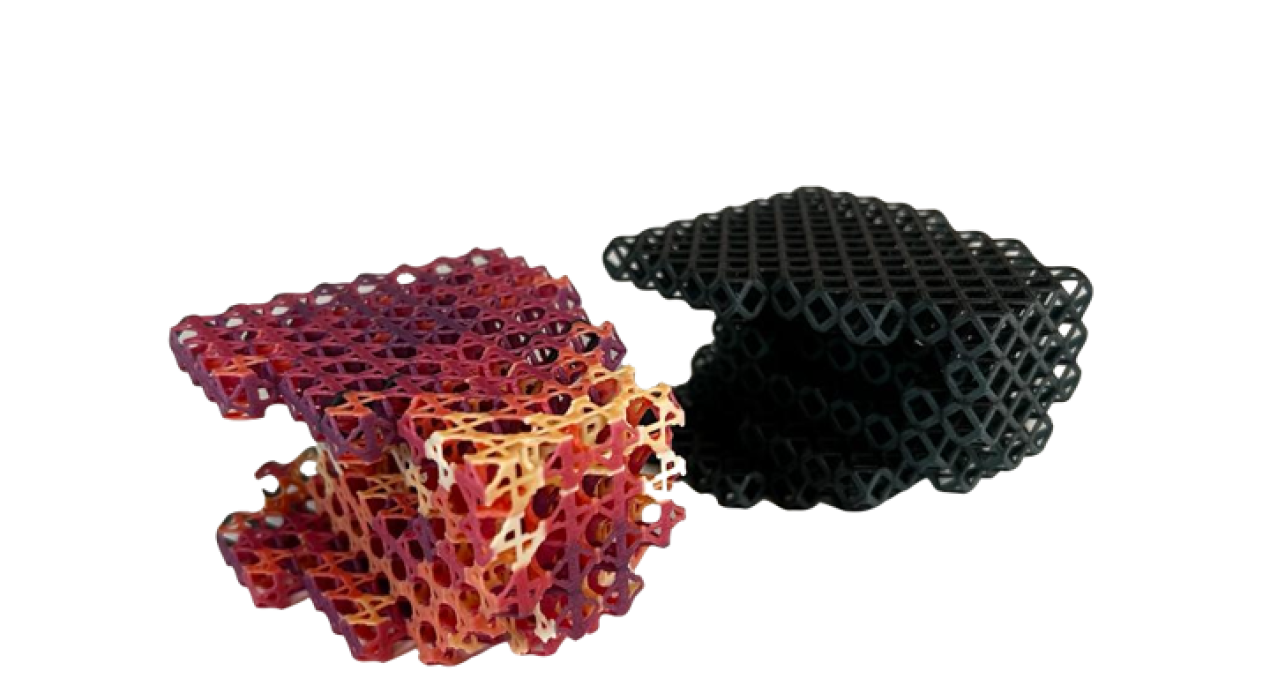
Designing materials based on global properties has been a long-standing goal. By using metamaterials, local cellular structures could be designed to control global properties and surpass continuum material properties. In this research. we introduce an inverse design workflow to design discrete mechanical metamaterial, to build macroscale structures that go beyond 3D printing. The fabrication process and its constraints are inherent in the concurrent micro-macro-optimization. We introduce first a top-down approach. Next, we generalize the previous by introducing a bottom-up approach where we use an inverse design workflow to create a universe library of parts. Comparative analysis will be presented to understand the benefit and cost of each approach in addition to fabricated pieces. Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
Modular robotic systems built of reconfigurable components offer an efficient and versatile alternative to traditional monolithic robots. However, as modular systems scale up, construction efficiency is compromised due to an increase in travel time and path planning complexity. We introduce a discrete modular material robot system that is capable of serial, recursive (making more robots), and hierarchical (making larger robots) assembly. The component composition is supported by an algorithm to compile the building blocks into swarms and plan the optimal construction path. Our approach challenges the convention that larger constructions need larger machines to build them, and could be applied in areas that today either require substantial capital investments for fixed infrastructure or are altogether unfeasible. Link to Nature Communications Engineering Paper | Link to MIT News Article | Link to BBC Podcast | Link to Lex Fridman Podcast CBA| 2022 | Group of 3 Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
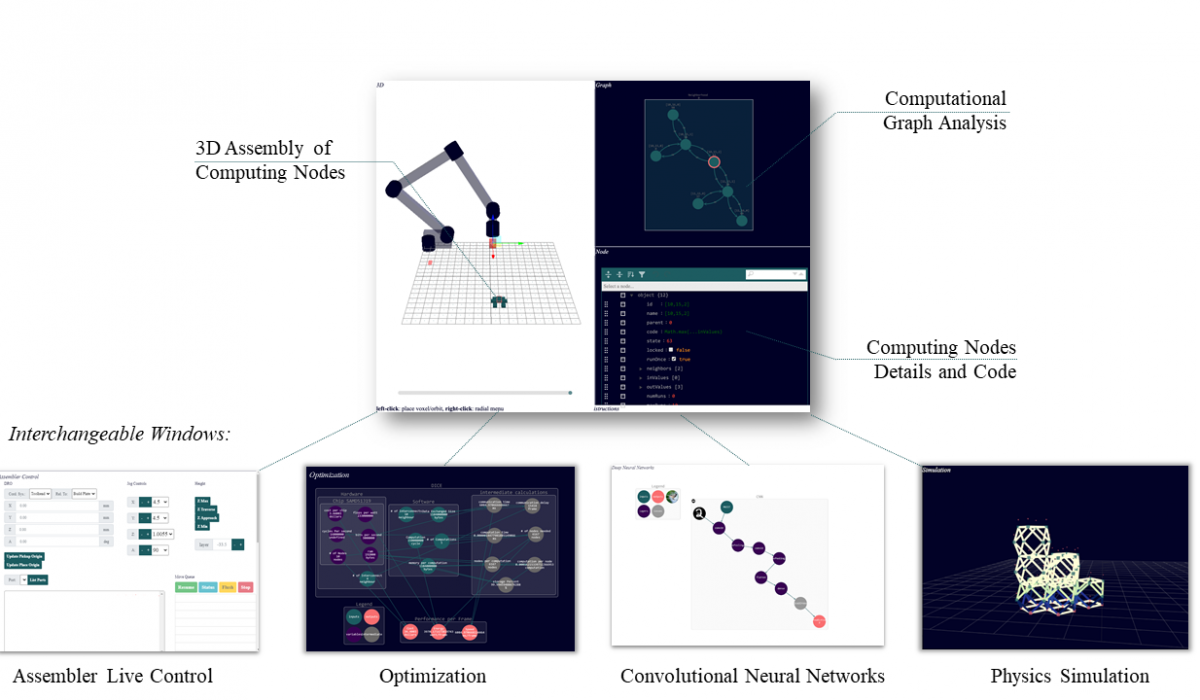
Interactive Demo 1: Assembler Control Interactive Demo 2: Voxel Simuation Interactive Demo 3: Convolutional Neural Network The Physical Computing Design tool is an integrated design tool for the design, simulation, optimization and fabrication of reconfigurable computing systems. Traditional electronics design workflows follow a sequential linear process that starts with design, then analysis and simulation, and finally system fabrication and testing. Often these stages are executed independently from each other, using different tools, making it hard to translate the feedback from the simulation or testing stages into viable design amendments. This adds considerable inefficiency to an inherently iterative design workflow. As an alternative, I developed an integrated, closed loop DICE design tool where one can design, simulate, optimize and fabricate re-configurable computing systems. This novel integrated design workflow paves the way for the design of discrete integrated circuits but also reconfigurable computing systems that can change and evolve while execution as needed. CBA | Under Development | Individual Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
Link to MIT News Article: Assembler robots make large structures from little pieces Link to Paper: Material-Robot System for Assembly of Discrete Cellular Structures Link to Detailed Documentation and Interactive Demo Research on the inverse kinematics, path planning and control of a swarm of relative robots to assemble discrete digital material. CBA | Spring 2019 | Individual Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›
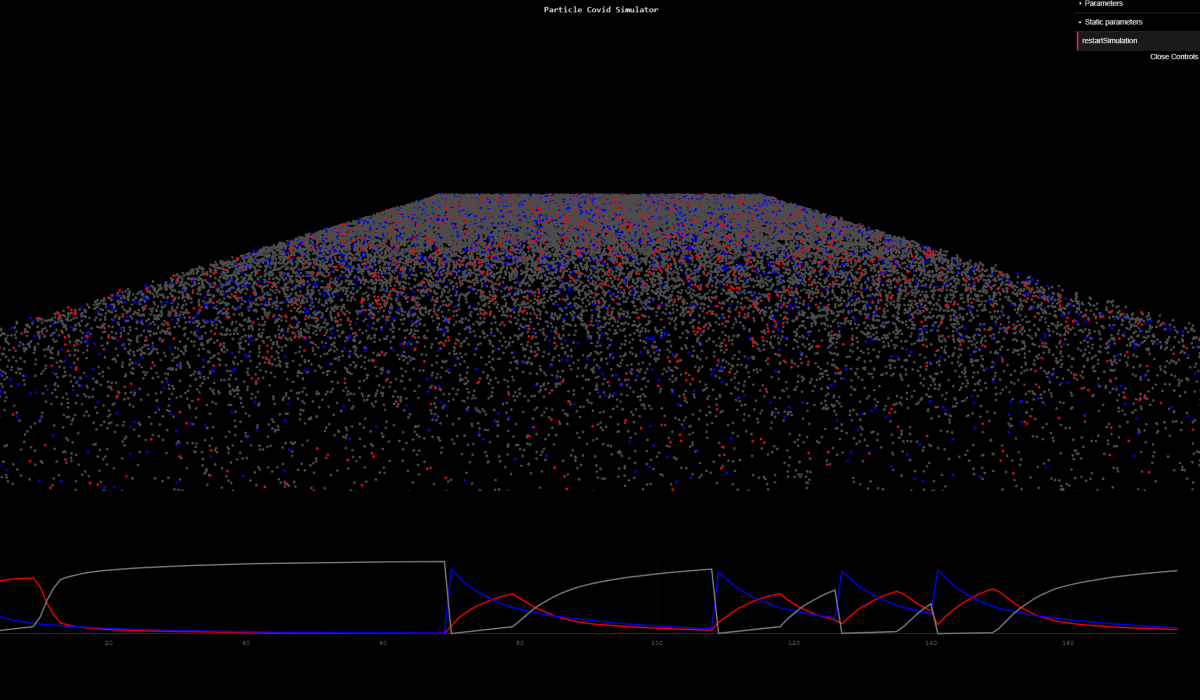
Link for Online Interactive Demo. This is an interactive visualization to help people understand how different parameters affect the spread of COVID 19. The simulation has 100,000 particles moving either randomly (or only going to central location), and using the GPU to massively parallelized the computation and visualization of the spread of the disease. On the top left, one could change some parameters like the percentage of people infected at the start of the pandemic, the infection probability given you are at close distance with an infected person, radius where the disease can be transmitted as well as how much time it takes until the symptoms appear. One can also change policies like being quarantined (only a small percentage of the population can move around). At the bottom of the screen a SIR (susceptible-infected-removed) model is calculated to see the total infected vs time and see the efficacy of different strategies when dealing with the pandemic. CBA| Spring 2020 | Individual Voxel Invention Kit (VIK) Graduate, PhD Omniverse MetaVoxels Designer Graduate, PhD
Read More ›